水塔由 空 到 滿 再到 空 的循環流程及馬達運轉情形如下:
題目說明:請依據下列要求,完成一個具備水位狀態顯示與自動抽水模擬系統。
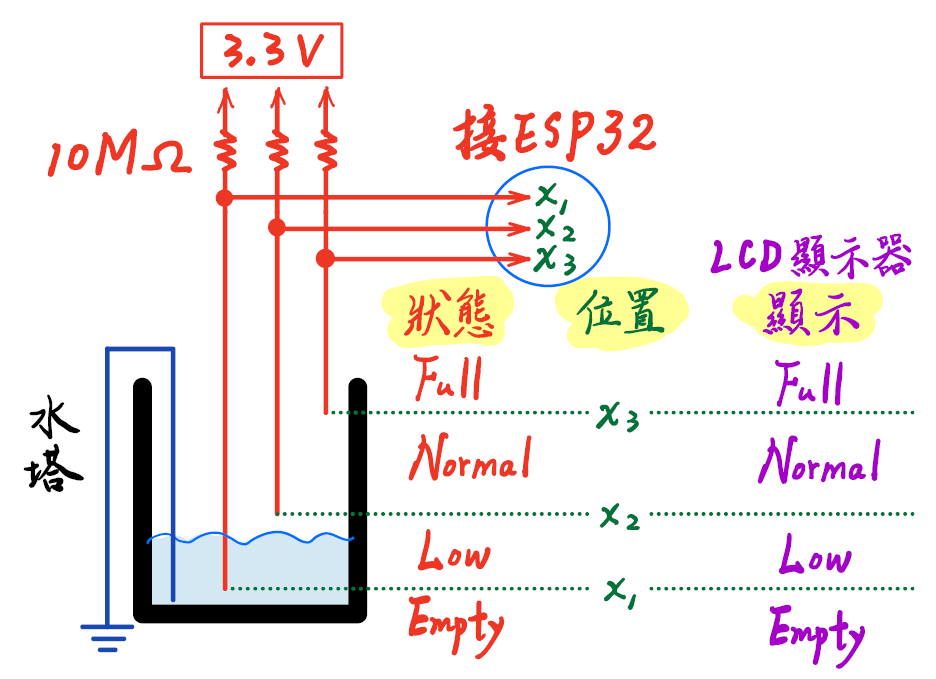
- 水位訊號偵測與校正:
- 請使用水杯/水箱模擬水塔,並利用導線及 10MΩ 上拉電阻配置基礎水位 (x1)、正常水位 (x2)、滿水位 (x3) 三個感測點。
- 為獲得較大的電壓偵測範圍,請使用
analogRead()指令取得 x1、x2、x3 的類比電壓數值。先透過串列埠觀察有水與無水時的數值變化,再自行定義判斷 High 與 Low 區間的門檻值。
- 水位狀態判定:系統需能根據 x1、x2、x3 的感測結果,判斷目前為以下四種狀態之一:
- Empty:水位低於 x1
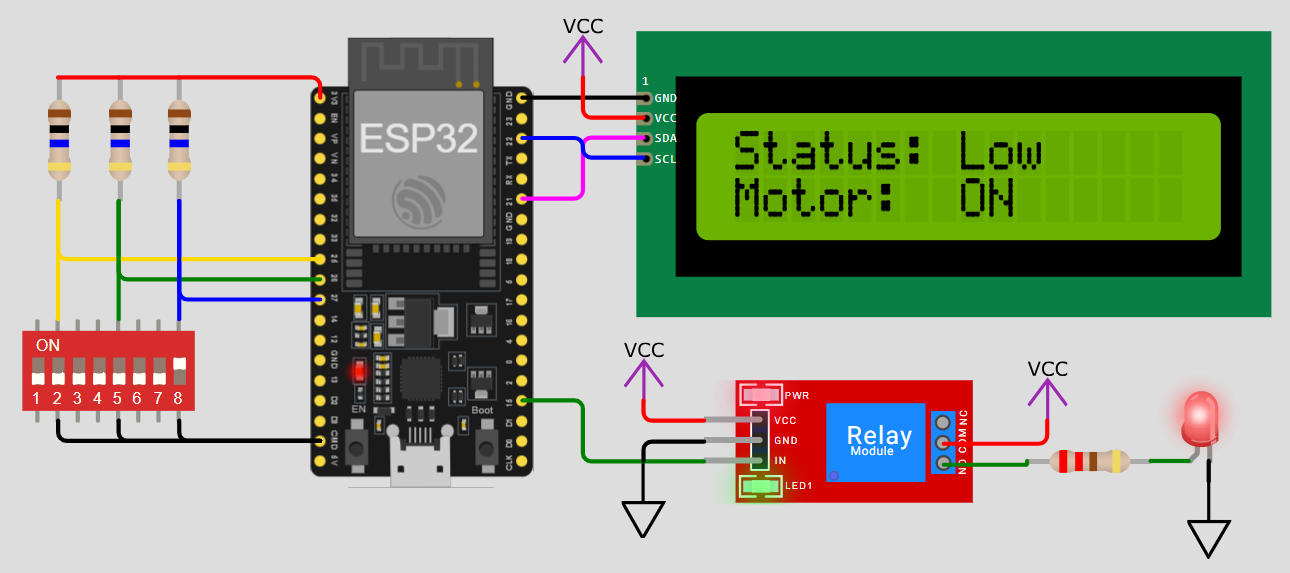
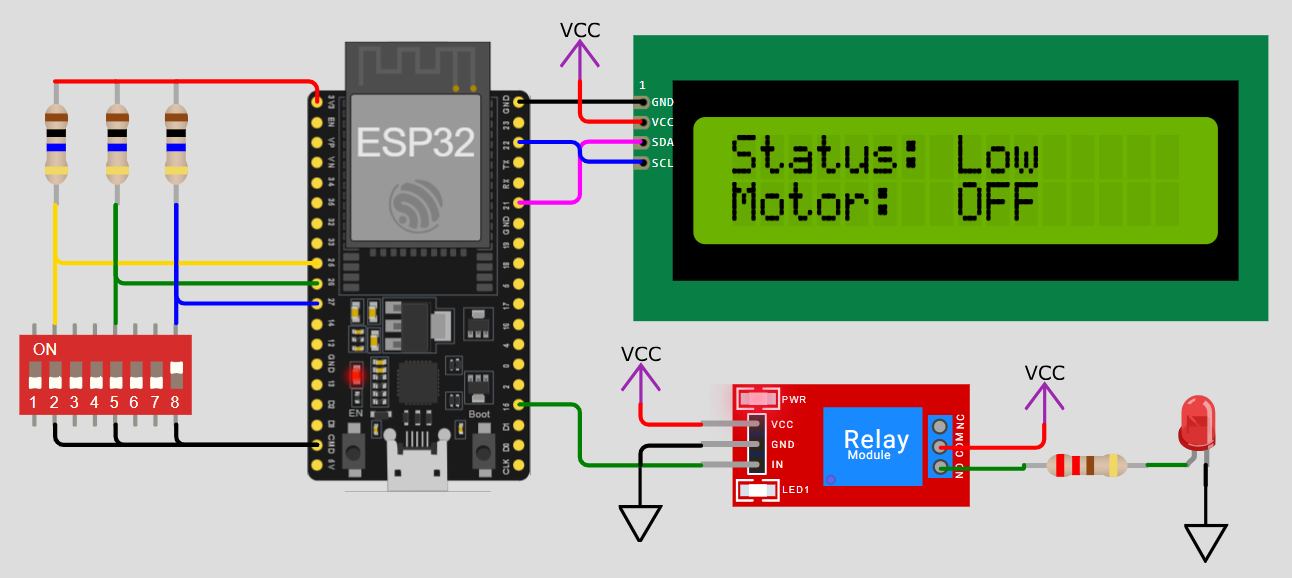
- Low:水位到達 x1,但未達 x2
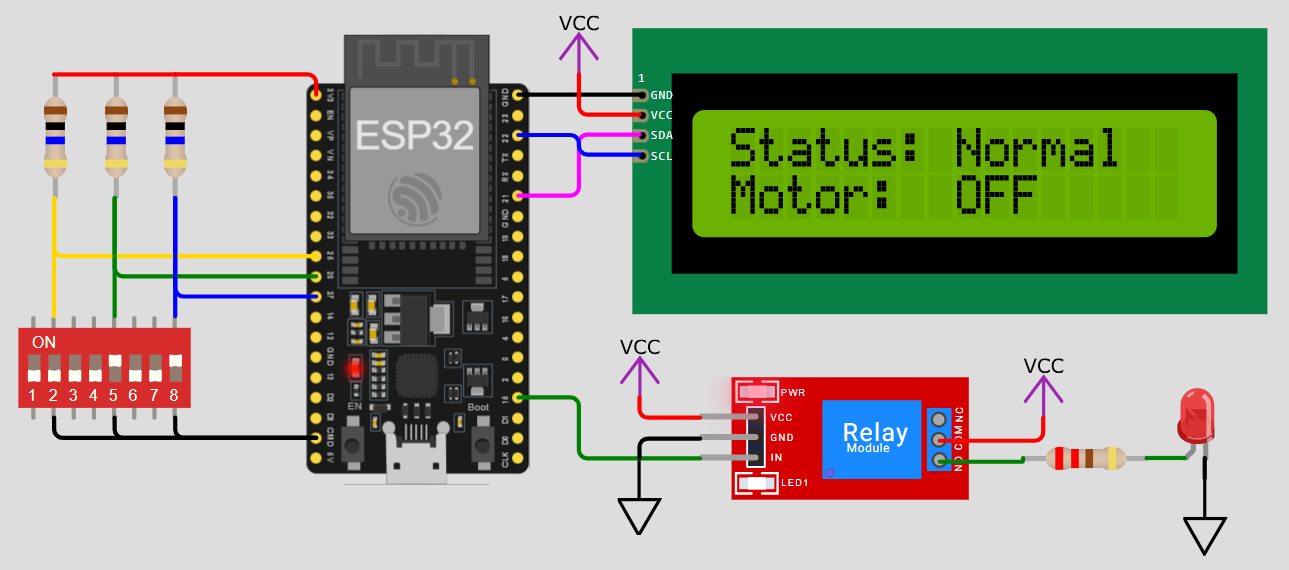
- Normal:水位到達 x2,但未達 x3
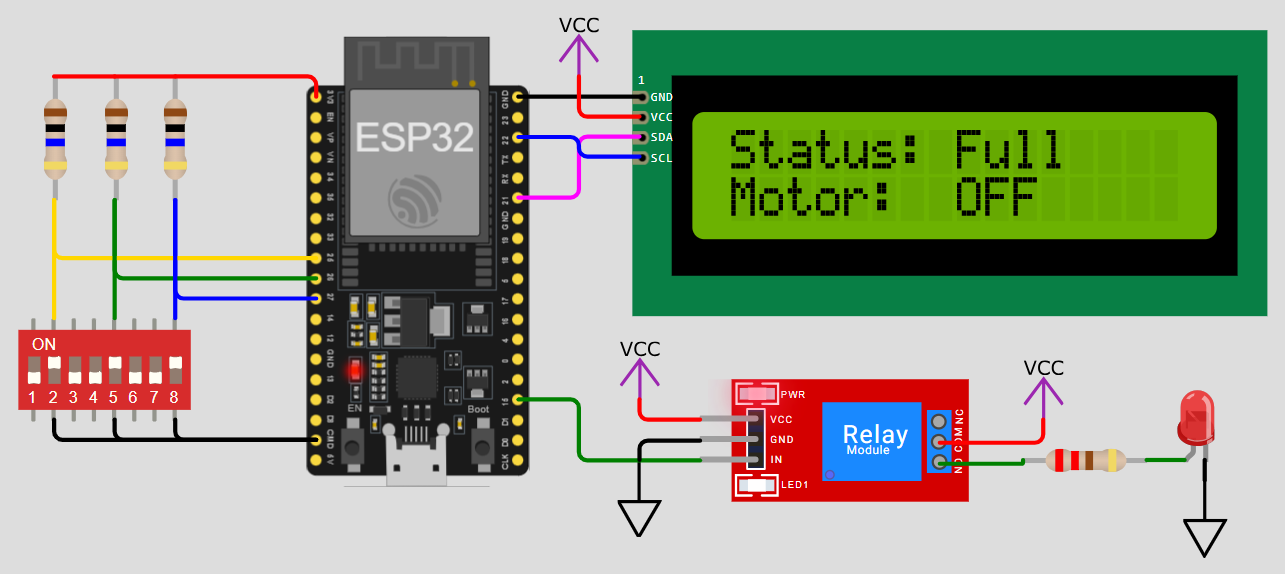
- Full:水位到達 x3
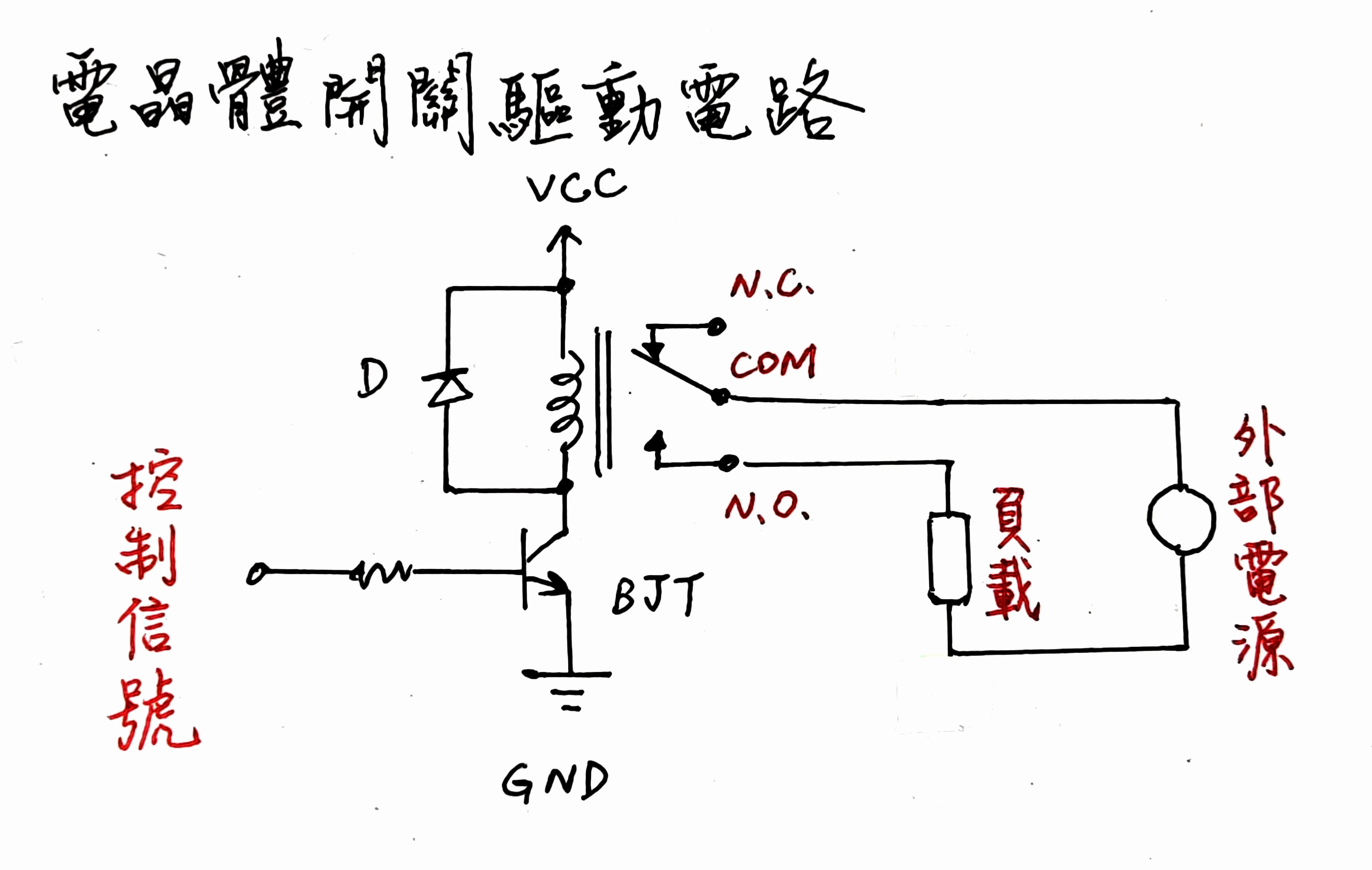
- 抽水馬達控制:
- 請利用外部電源、電晶體與繼電器構成驅動電路,並在繼電器輸出端連接一顆 LED 燈,以此來模擬抽水馬達的運轉狀態。
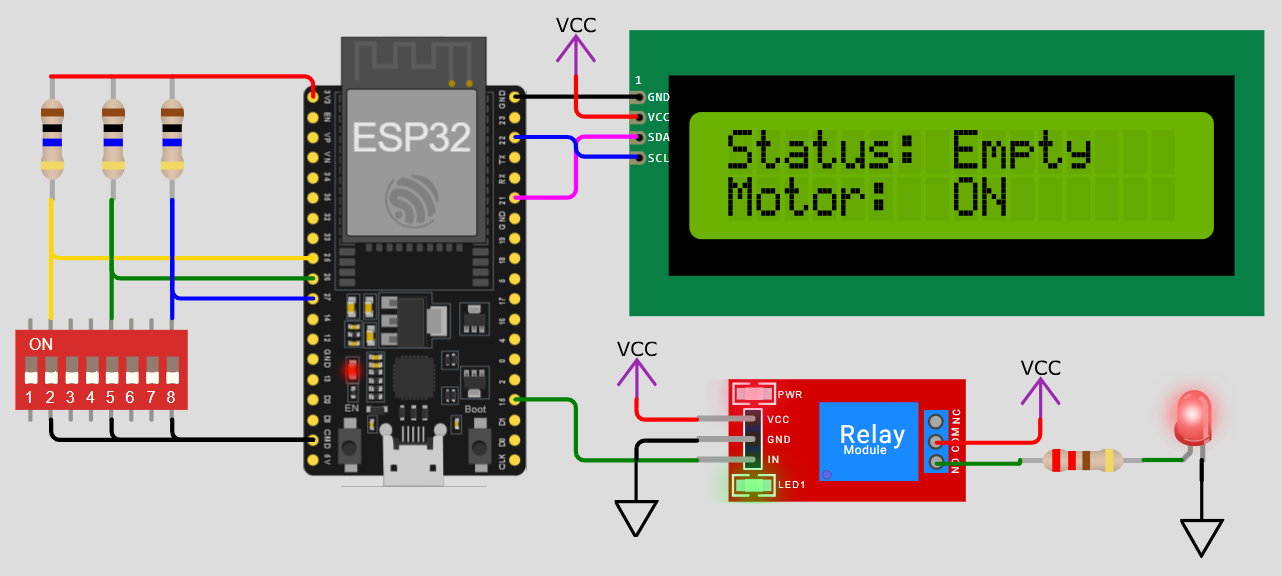
- 用水時(啟動條件): 當水位低於 x1 (Empty狀態) 時,繼電器導通,馬達開始運轉。
- 抽水時(停止條件): 當馬達運轉使水位持續上升,直到水位到達 x3 (Full狀態) 時,繼電器斷開,馬達停止運轉。
- 在 x1 與 x3 之間時,馬達必須保持原有的運作狀態,不可反覆啟閉。
- I2C 液晶顯示器 (LCD) 顯示要求:
- 請將目前的系統狀態即時顯示於 I2C LCD 上。
- 第一行顯示水位狀態: 依據實際水位顯示
Full、Normal、Low或Empty。 - 第二行顯示馬達狀態:
- 當馬達運轉時(LED燈亮),LCD 需顯示
Motor ON。 - 當馬達停止時(LED燈滅),LCD 需顯示
Motor OFF。
- 當馬達運轉時(LED燈亮),LCD 需顯示
實體模擬實驗室
請調整下方滑桿模擬水位變化,觀察馬達狀態如何保持穩定。
X3 (Full)
X2 (Normal)
X1 (Low/Empty)
Empty
Full
I2C LCD 1602 模擬輸出
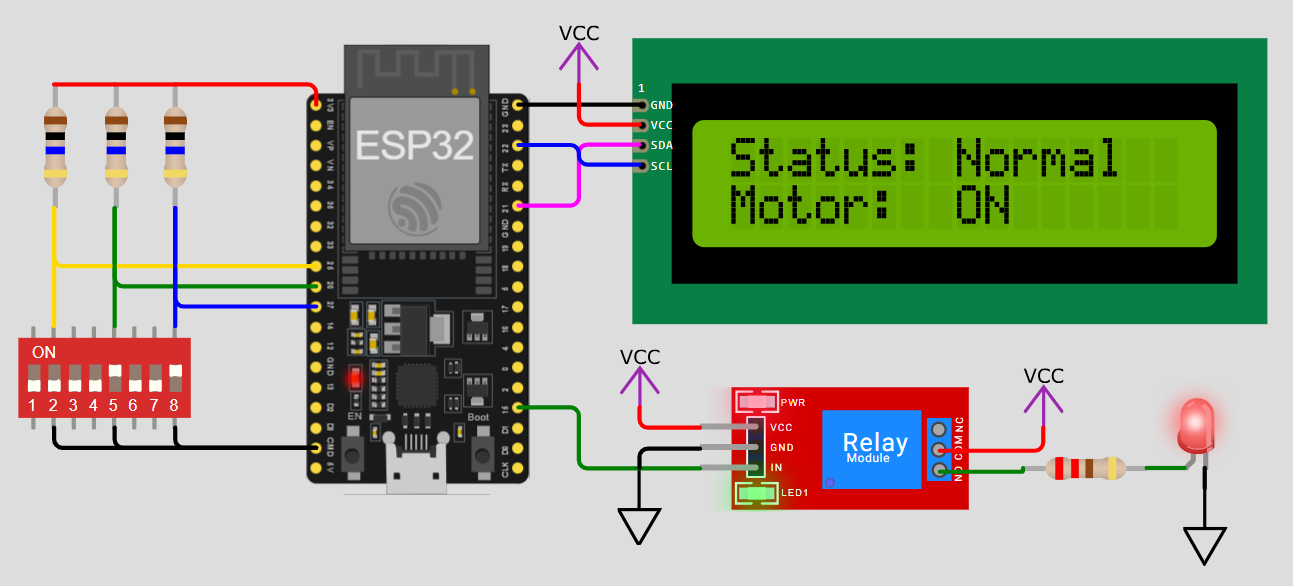
Status: Normal
Motor: OFF
硬體元件狀態
馬達 LED (繼電器)
2450
即時 ADC 讀值
實驗觀察: 只有當水位徹底低於 X1 (Empty) 時馬達才會啟動;水位到達 X3 (Full) 時才會關閉。這就是「遲滯控制」機制。
參考實作成果: